The latest firmware on the latest EZ-B v4 Smart Robot Controller can use a digital port to identify an active connection. This is important if your robot is requiring safety to shut down servos or locomotion when the client disconnects. Use the digital port connected to a solid-state relay that powers the locomotion and/or servos.
Some DIY robots using low quality analog servos will find the servos twitch when power is applied. This can be resolved by powering the servo after the EZ-B has been powered (usually a delay of 1 second is good). Or, you can use a solid-state relay connected to the Connection Status digital pin. This will allow the servos to only receive power when a client is connected.
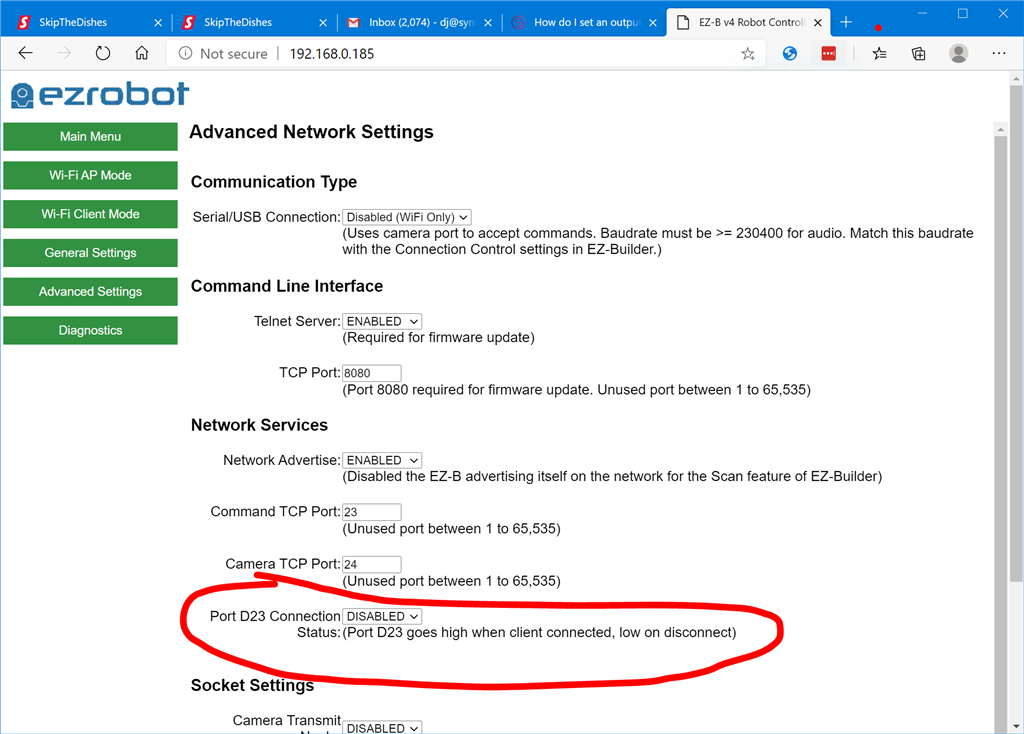
Configure Digital Status Pin Access the web interface of the EZ-B to configure the option for the status pin.